GPIO寄存器介绍
对单片机外设的操作就是对寄存器的操作,无论是所谓标准库还是所谓HAL库,都只是形式而已。那么,想要深入地了解STM32的GPIO,学会实现功能和排查问题,就必须对GPIO有一个比较好的认识。
对于STM32F1系列而言,每个GPIO端口具备七个寄存器,他们分别是——两个配置寄存器(CRL、CRH)、两个数据寄存器(IDR、ODR)、一个置位、复位寄存器(BSRR)、一个复位寄存器(BRR)、一个锁定寄存器(LCKR)。以下是简略的介绍:
CRL与CRH(configuration register low/high)
CRL与CRH都是端口配置寄存器,他们都是32位的,这两个寄存器的性质一样,用于存储表示GPIO模式的信息。我们知道,STM32每组GPIO有16个IO,那么,两个配置寄存器提供的数据量为64bit,每个IO分到的就是4bit,这4bit的数据就描述了一个IO的配置。
从手册中我们可以看到每个IO对应的“4bit”是如何分配的:(来自STM32中文参考手册V10,RM0008的翻译版本,后同)

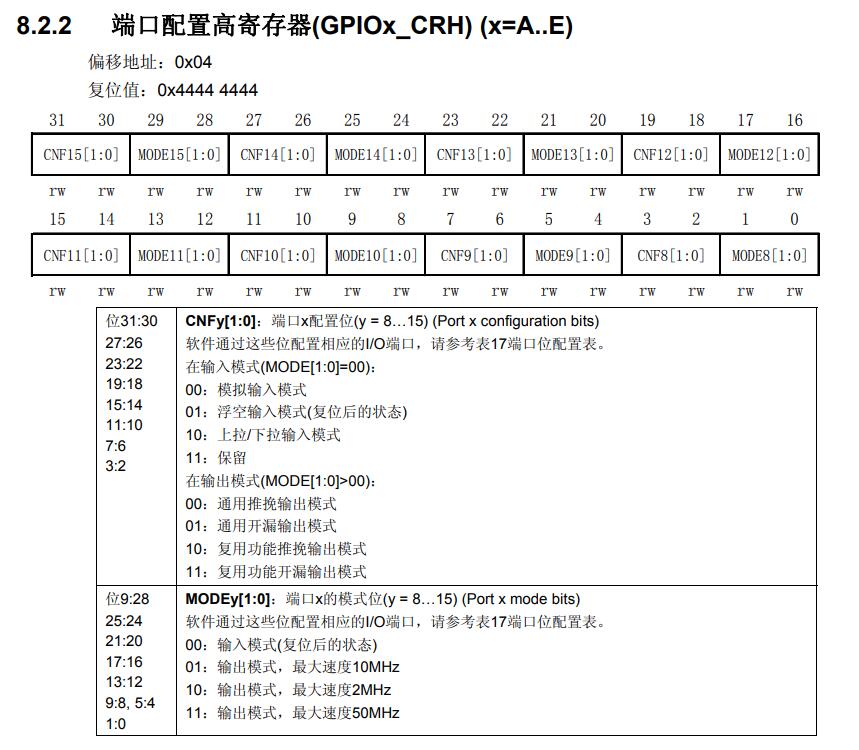
需要注意的是,CRL和CRH只能以“字”(对于32位体系,字为32位,半字为16位,字:Word,半字:Half Word)的形式读出和写入,例子如下:
GPIOA->CRL = 0xFFFFFFFF;//对GPIOA的CRL写入数据
IDR与ODR(input/output data register)
IDR是GPIO的输入数据寄存器。其实它是个32位的寄存器,但是,由于一个GPIO端口只有16个IO,所以,该寄存器的高16bit保留,如果尝试读出的话,这些位始终为0。低16bit与IO的对应关系见下图:
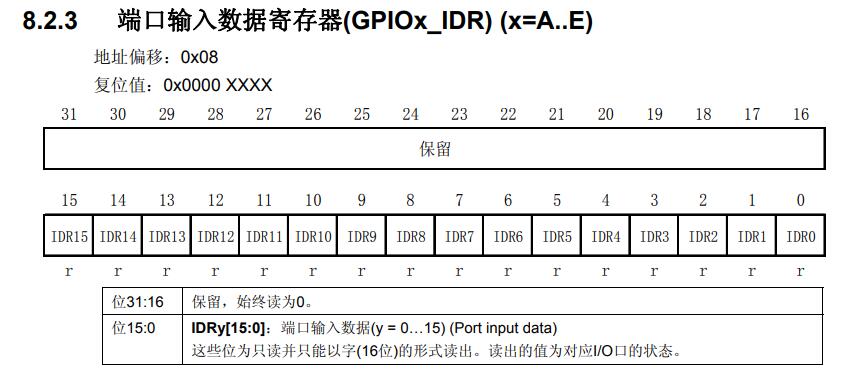
(你应该能注意到那个“r”和前面的“rw”的区别吧?)
ODR是GPIO的输出数据寄存器。它同样是32位寄存器,但是高16bit保留。
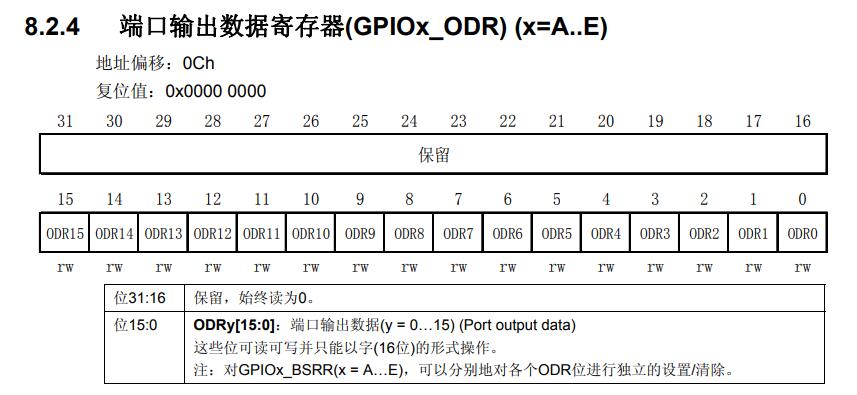
另外,值得注意的是,IDR和ODR寄存器的低16bit可以以16bit的形式操作(其实应该说半字),例如这样:
GPIOA->ODR = 0XFFFF;
uint16_t value = (uint16_t)GPIOA->IDR;
BSRR( bit set/reset register)
设置GPIO某一位(即某一单独的IO)的状态是单片机编程中常见的操作,但是,如果直接向ODR寄存器写数据的话,16个IO的状态都受输入数据的影响。当然也不是没有单独操作某一位的方法——先读出ODR现有的数据,修改某一bit以后再写回去。不过呢,这样在实现上麻烦一些,而且速率不如操作BSRR寄存器。
前面提到过BSRR是一个“置位/复位寄存器”(Set/Reset),意思就是操作这个寄存器可以把IO电平拉高或者拉低,具体怎么做呢?手册说得很清楚:
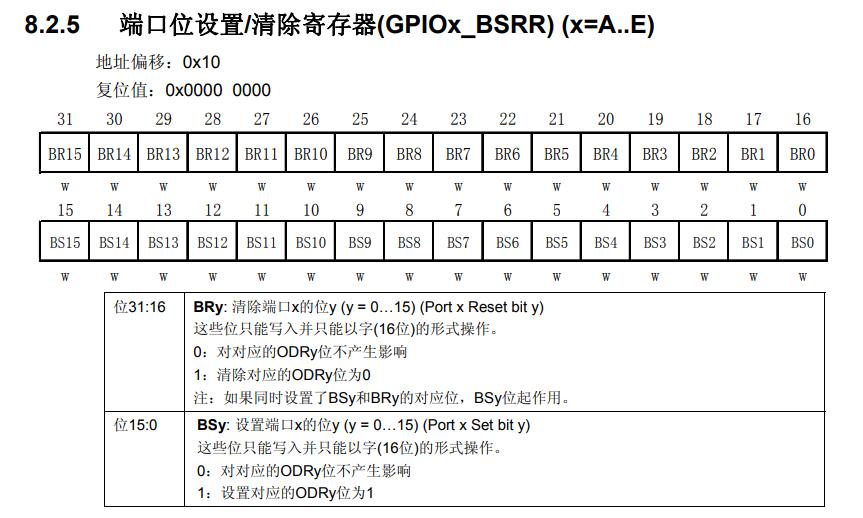
我们可以直接对BSRR写入16bit的数据,这样的话起到的作用将是Set(拉高IO电平)。
BSRR同时也支持32位写入,如下:
GPIOA->BSRR = (~data & 0xff)<<16 | (data & 0xff);//请分析这段代码实现的功能
不过,光是这么说的话,你可能不会太注意到寄存器名称里“bit”的用意。这样,让我们来分析一下BSRR是怎么操作IO的:
- 首先,单片机复位后,BSRR所有位为0。
- 往BSRR写入数据,例如0X0001——将某个GPIO端口的Pin_0置高。
- GPIO将对应的Pin设置为指定的状态,完成后将BSRR清零。
值得一提的是,直接决定IO输出状态的是ODR寄存器的内容,F1的手册里对于相关内容没有明确的说明,但F4的手册中指出BSRR对ODR具有位操作权限(姑且认为它们GPIO的实现差不太多吧)
总之,我们可以往BSRR里写数据来实现”一次操作即可改变指定IO的状态”,而一些宏则让这个过程更加直观了,如下:(摘自stm32f10x_gpio.h V3.5.0)
/** @defgroup GPIO_pins_define
* @{
*/
#define GPIO_Pin_0 ((uint16_t)0x0001) /*!< Pin 0 selected */
#define GPIO_Pin_1 ((uint16_t)0x0002) /*!< Pin 1 selected */
#define GPIO_Pin_2 ((uint16_t)0x0004) /*!< Pin 2 selected */
#define GPIO_Pin_3 ((uint16_t)0x0008) /*!< Pin 3 selected */
#define GPIO_Pin_4 ((uint16_t)0x0010) /*!< Pin 4 selected */
#define GPIO_Pin_5 ((uint16_t)0x0020) /*!< Pin 5 selected */
#define GPIO_Pin_6 ((uint16_t)0x0040) /*!< Pin 6 selected */
#define GPIO_Pin_7 ((uint16_t)0x0080) /*!< Pin 7 selected */
#define GPIO_Pin_8 ((uint16_t)0x0100) /*!< Pin 8 selected */
#define GPIO_Pin_9 ((uint16_t)0x0200) /*!< Pin 9 selected */
#define GPIO_Pin_10 ((uint16_t)0x0400) /*!< Pin 10 selected */
#define GPIO_Pin_11 ((uint16_t)0x0800) /*!< Pin 11 selected */
#define GPIO_Pin_12 ((uint16_t)0x1000) /*!< Pin 12 selected */
#define GPIO_Pin_13 ((uint16_t)0x2000) /*!< Pin 13 selected */
#define GPIO_Pin_14 ((uint16_t)0x4000) /*!< Pin 14 selected */
#define GPIO_Pin_15 ((uint16_t)0x8000) /*!< Pin 15 selected */
#define GPIO_Pin_All ((uint16_t)0xFFFF) /*!< All pins selected */
BRR( bit reset register)
BRR寄存器是一个很尴尬的寄存器。它是一个32位寄存器,高16bit保留,低16bit实现复位GPIO各个Pin的功能,如下:

它尴尬就尴尬在——它的功能可以被BSRR的高16bit完全替代(所以在F4里它没了)
然后,你可以以16bit来操作这个寄存器,如下:
GPIOA->BRR = 0XFFFF;
LCKR(configuration lock register)
用得不多,自己了解。
标准库下的GPIO操作
熟悉了寄存器以后,再来使用库函数就会感觉很轻松了,标准库尤其如此——标准库试图把各种操作都“一板一眼”地实现,结果各种函数一多,难免显得有些繁琐,函数说明读起来确实会觉得有些头疼。不过,如果能自己读一下函数的实现,再结合已有的寄存器知识,其实很容易理解。
比如,我们来看看常用的GPIO_SetBits(),其实现如下:(摘自stm32f10x_gpio.c V3.5.0)
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
/* Check the parameters */
assert_param(IS_GPIO_ALL_PERIPH(GPIOx));
assert_param(IS_GPIO_PIN(GPIO_Pin));
GPIOx->BSRR = GPIO_Pin;
}
前两句是所谓“断言”,意在检查参数是否符合一定的规则。而实现功能的语句,就是GPIOx->BSRR = GPIO_Pin;这一句而已。
嗯,看到这估计你已经能猜到GPIO_ResetBits是咋实现的了,没错,就是那样!
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
/* Check the parameters */
assert_param(IS_GPIO_ALL_PERIPH(GPIOx));
assert_param(IS_GPIO_PIN(GPIO_Pin));
GPIOx->BRR = GPIO_Pin;
}
现在,我们来列一列gpio.c里常用的函数吧,如下:
void GPIO_DeInit(GPIO_TypeDef* GPIOx);
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);
uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx);
uint8_t GPIO_ReadOutputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
uint16_t GPIO_ReadOutputData(GPIO_TypeDef* GPIOx);
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_WriteBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, BitAction BitVal);
void GPIO_Write(GPIO_TypeDef* GPIOx, uint16_t PortVal);
GPIO_Init和DeInit比较麻烦,而且一般用不着太了解,就不讲了。SetBits和ResetBits是操作BSRR和BRR。然后呢,Write是操作ODR,WriteBit则是视情况操作BSRR或BRR;ReadInputData是读IDR寄存器内容,ReadInputDataBit是读IDR以后判断指定位的状态;ReadOutputData是读ODR寄存器内容,ReadOutputDataBit是读ODR以后判断指定位的状态。
总的来说,虽然函数一大堆,但是对于GPIO的操作主要就是变着法地读、写IDR、ODR、BSRR、BRR这四个寄存器,然后对得到地信息进行一些处理之后返回一些值,只要了解了寄存器地特性,就不会对这些函数感到头疼了。
当然,还有个办法缓解众多函数名带来的头疼症状——减少函数的数量。
HAL库下的GPIO操作
HAL的设计追求简洁和通用,虽然这样会导致层级复杂、单个函数承担的功能更多,并且需要更多各种各样的宏等等问题,但是使用起来确实很简单,比如,以GPIO的操作为例,stm32f1xx_hal_gpio.c里和IO操作直接关联的函数就三个:
GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin);
void HAL_GPIO_WritePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState);
void HAL_GPIO_TogglePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin);
挨个分析一下吧,先看看GPIO_PinState是个什么东东。
typedef enum
{
GPIO_PIN_RESET = 0u,
GPIO_PIN_SET
} GPIO_PinState;
嗯,是个枚举类型,第一个成员是0,枚举类型里成员的值是递增的,步进值为1。所以,GPIO_PIN_RESET就是0,GPIO_PIN_SET就是1,GPIO_PinState这个类型的数据只能取这两个值。
然后,以下是HAL_GPIO_ReadPin()的实现:
GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin)
{
GPIO_PinState bitstatus;
/* Check the parameters */
assert_param(IS_GPIO_PIN(GPIO_Pin));
if ((GPIOx->IDR & GPIO_Pin) != (uint32_t)GPIO_PIN_RESET)
{
bitstatus = GPIO_PIN_SET;
}
else
{
bitstatus = GPIO_PIN_RESET;
}
return bitstatus;
}
可以看到,这个函数做的工作是判断指定的位的状态,全为0则返回0,否则返回1。
接下来看看HAL_GPIO_WritePin()的实现:
void HAL_GPIO_WritePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState)
{
/* Check the parameters */
assert_param(IS_GPIO_PIN(GPIO_Pin));
assert_param(IS_GPIO_PIN_ACTION(PinState));
if (PinState != GPIO_PIN_RESET)
{
GPIOx->BSRR = GPIO_Pin;
}
else
{
GPIOx->BSRR = (uint32_t)GPIO_Pin << 16u;
}
}
可以看到,BRR惨遭抛弃,这个函数用BSRR实现了Set/Reset指定位的功能。
然后,来看看HAL_GPIO_TogglePin()的实现:
void HAL_GPIO_TogglePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin)
{
/* Check the parameters */
assert_param(IS_GPIO_PIN(GPIO_Pin));
if ((GPIOx->ODR & GPIO_Pin) != 0x00u)
{
GPIOx->BRR = (uint32_t)GPIO_Pin;
}
else
{
GPIOx->BSRR = (uint32_t)GPIO_Pin;
}
}
这个函数提供了翻转指定IO的电平状态的功能,用起来挺方便的,你可以把这个函数添加到自己的工程模板里面。
总结一下,HAL提供的函数是非常简洁的,而且是一种通用化的设计。但是,有个比较严重的问题——很多时候,你不能直接通过HAL库提供的函数实现操作寄存器能实现的所有功能,例如,读取GPIOA端口全部IO的状态并返回一个uint16_t 类型的数据,操作寄存器是uint16_t value = GPIOA->IDR,但是用HAL的话就无法直接实现(当然你也可以一位一位地读数据然后拼起来)。这也就导致,虽然HAL库看起来比标准库简单得多,而且像CubeMX这些提供了很多方便的诸如时钟配置、外设配置之类的功能。但是,要想灵活使用,需要使用者对于外设的特性、寄存器等等有着更加深入的了解——这也就是为什么我不推荐新手采用HAL库上手STM32。
顺便再说几句吧,作为电子技术的学习者,不应该太过依赖于平台。平台总是会过时的,但是公式和定理不会——最多被修正一下。51会过时,stm32会过时。但是,UART、IIC、SPI协议不会过时;编译原理、计算机体系结构不会过时;各种实现和设计的思路不会过时······多用几种单片机,会发现IDR、ODR到处都有;用用C#和Qt,发现怎么Button、comboBox之类的控件大家都差不多;多用几个换板子的软件,发现拉线、铺铜、过孔啥的,全世界好像都一样······
在经历中总结,找到那些到处都有的东西,这是学习者必做的功课——特别是对于单片机技术的学习者。如果之前没有对寄存器有过比较详细的了解的话,编写一篇这样的指南应该能给自己带来不少的收获,所以呢,我推荐大家自己找一款自己正在使用的开发平台,针对某一个功能写一篇类似的文档,简单练习一下。
不要求提交(咳,之前的还没回复完)。